Documentation
This validation case belongs to fluid dynamics. This test case aims to validate the following parameters for a quadcopter drone thrust in ground proximity:
The simulation results of SimScale were compared to the research performed by C. Paz, E. Suarez and C. Gil, J. Vence published in the paper “Assessment of the methodology for the CFD simulation of the flight of a quadcopter UAV” in November 2021\(^1\).
The analytical method used in the research paper is derived from measurements for a slightly different quadcopter, with blades of the same radius.
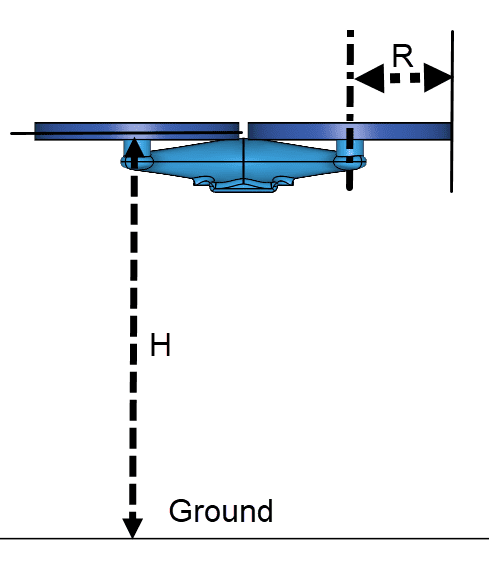
To compare SimScale to the results in [1], an analysis of different distances from a quadcopter drone to the ground is performed and the thrust ratios are compared. Distance from ground and rotor radius dimensions are taken as shown in Figure 1:
The quadcopter geometry used for this case can be seen below:
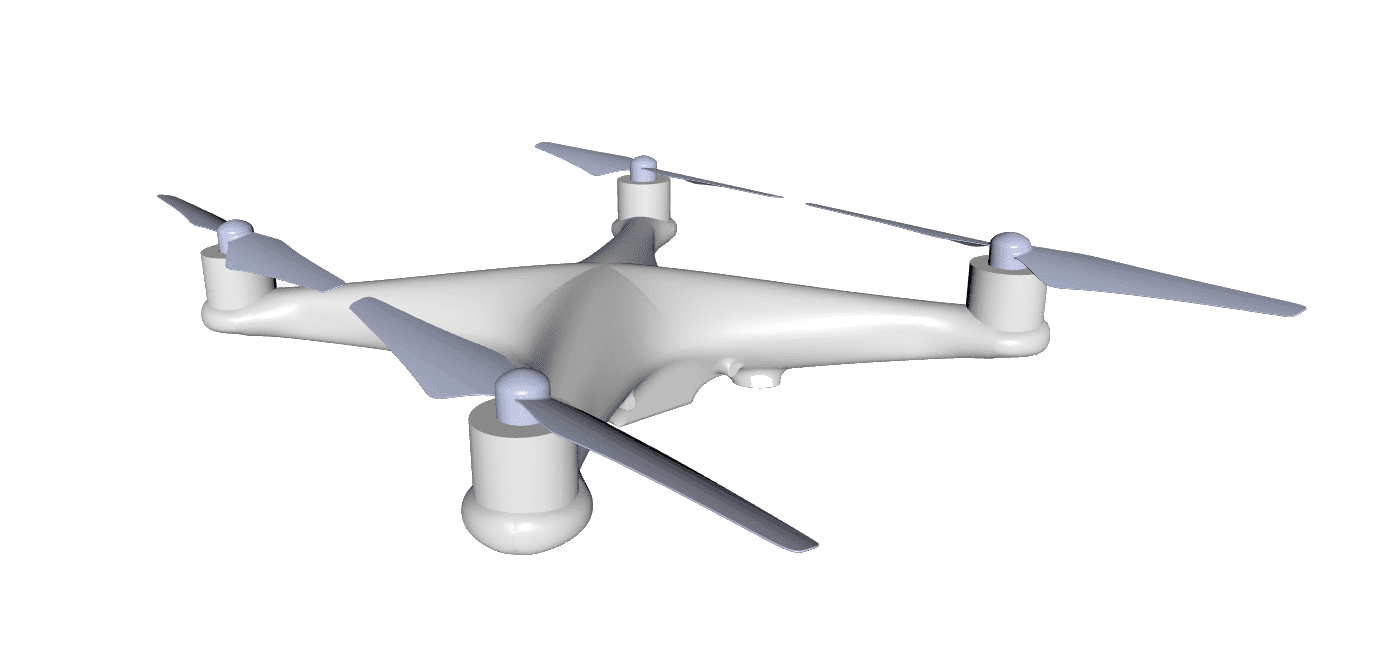
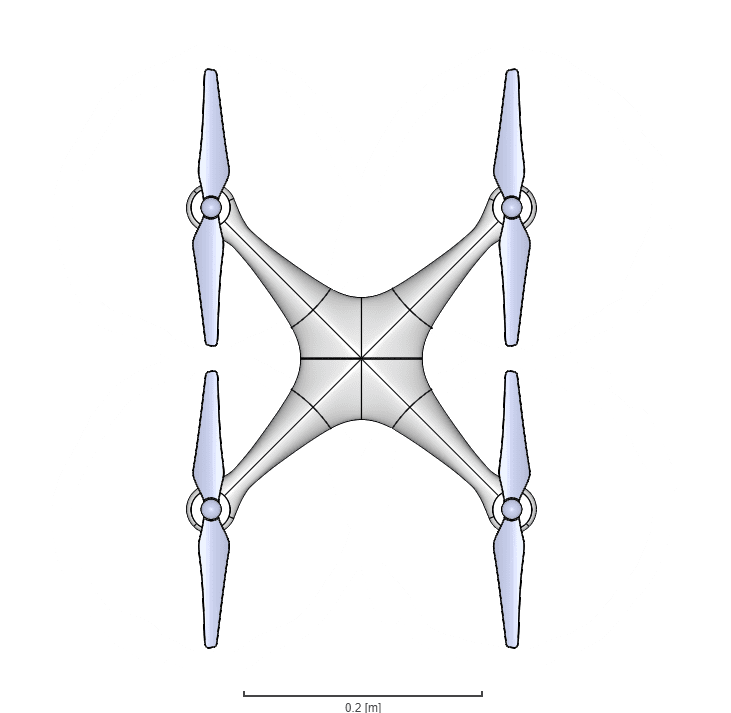
It’s a DJI-Phantom quadcopter with the landing leg and camera removed. the DJI-Phantom is a quadcopter drone used in multiple applications. The rotor blades of the drone were all aligned as seen in Figure 3:
Analysis Type: Steady-State, subsonic analysis with MRF rotating zone, using the k-epsilon turbulence model.
The Subsonic mesher algorithm with hexahedral cells was used to generate the mesh. Multiple meshes with incrementally increasing refinement were generated in parallel using the automatic meshing functionality before comparing different height setups.
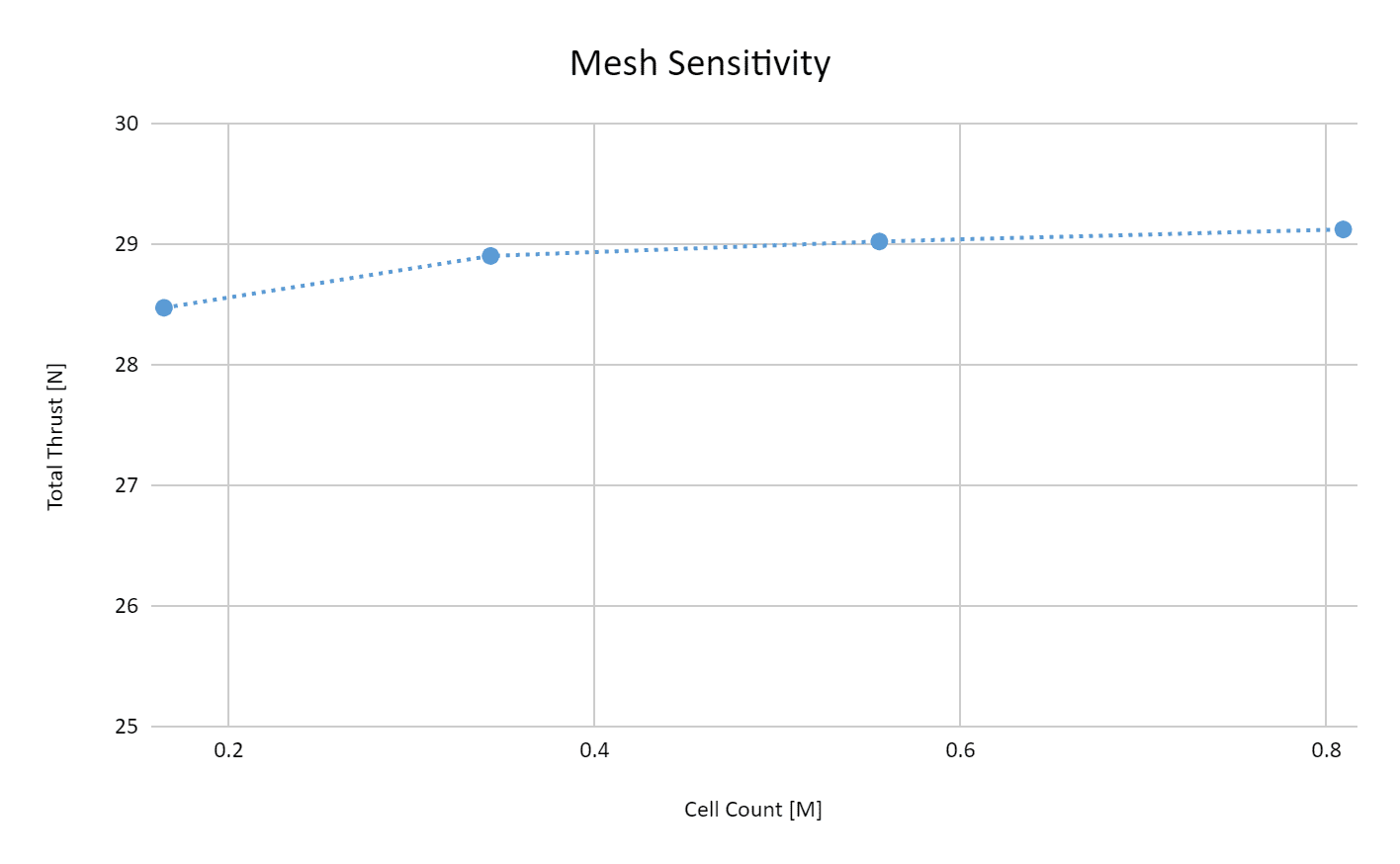
As seen in Figure 4 the total thrust converges to 29 \( N \) for a cell count higher than 0.5 million cells, with a deviation of less than 1 % between 0.55 and 0.8 million cells. Therefore all results with a cell count higher than 0.55 are considered mesh insensitive.
Drone Propeller Study
A validation case for single propeller has already been documented and can be accessed below where a further investigation into the mesh of a single propeller has been performed.
Material:
Boundary Conditions:
To compare the results gained by SimScale with the published results \(^1\) the Sanches-Cuevas Equation is used.
$$ \frac{T_{IGE}}{T_{OGE}} = \frac{1}{1-(\frac{R}{4H})^2-R^2(\frac{H}{\sqrt{(d^2+4H^2)^3}})-(\frac{R^2}{2}) (\frac{H}{\sqrt{(2d^2+4H^2)^3}}) -2R^2 (\frac{H}{\sqrt{(b^2+4H^2)^3}})K_{b} } \tag{1} $$
Where,
Comparison of the \( \frac{T_{IGE}} {T_{OGE}} \) ratio obtained from the SimScale results against the results obtained from [1] is given below:
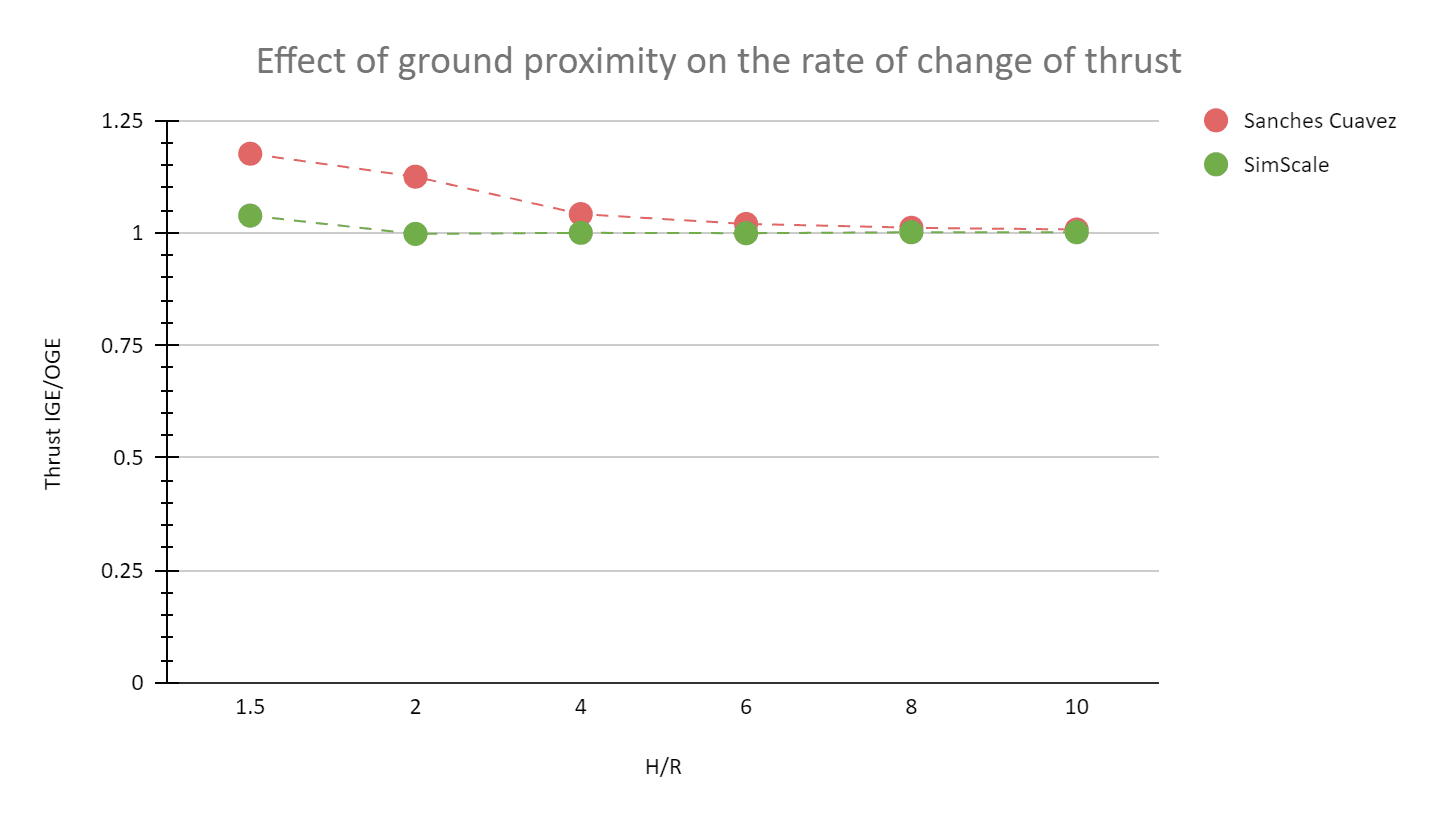
The SimScale result for the quadcopter shows a good correlation with the Sanches Cuevaz curve, especially for height to radius ratios higher than four. The percentage of error is high for low \(H/R\) ratios because the SimScale data is compared with the analytical data, which does not account for close-to-ground effects, SimScale does.
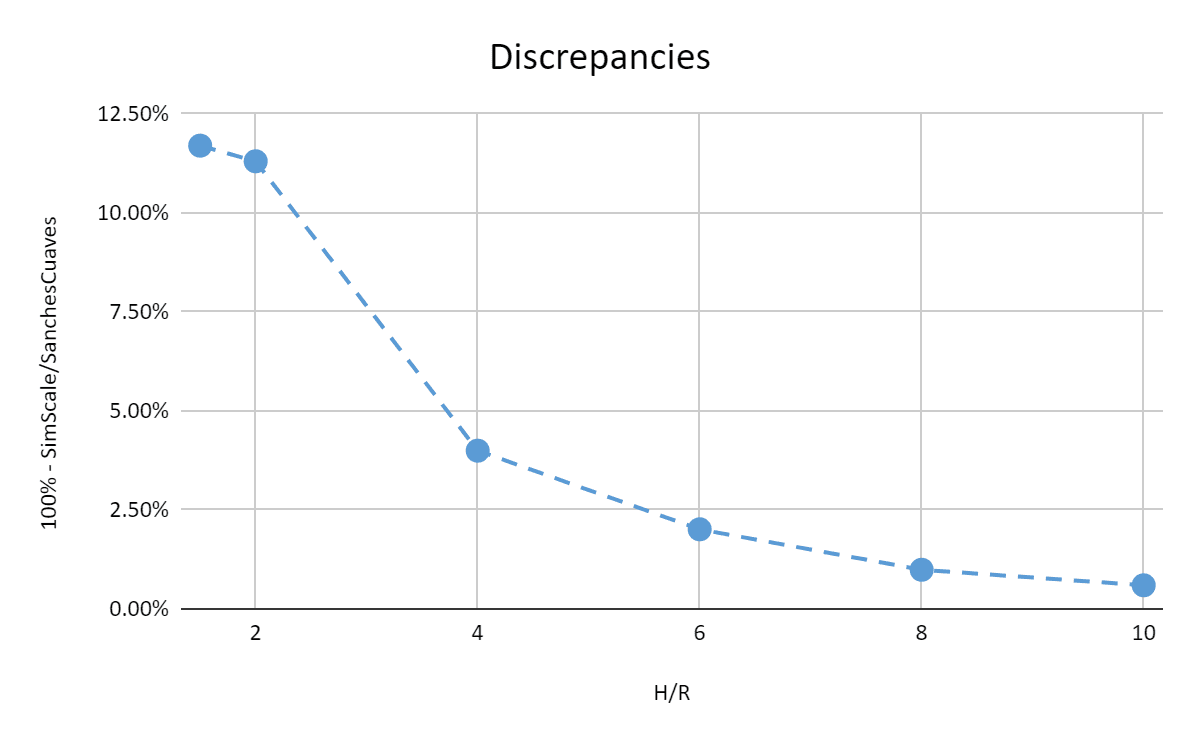
Below are the discrepancies for each run:
In the following Figure 7, the velocity is plotted at the rotor plane for different heights. It is noticeable that for higher heights the influence of the ground is not noticeable.
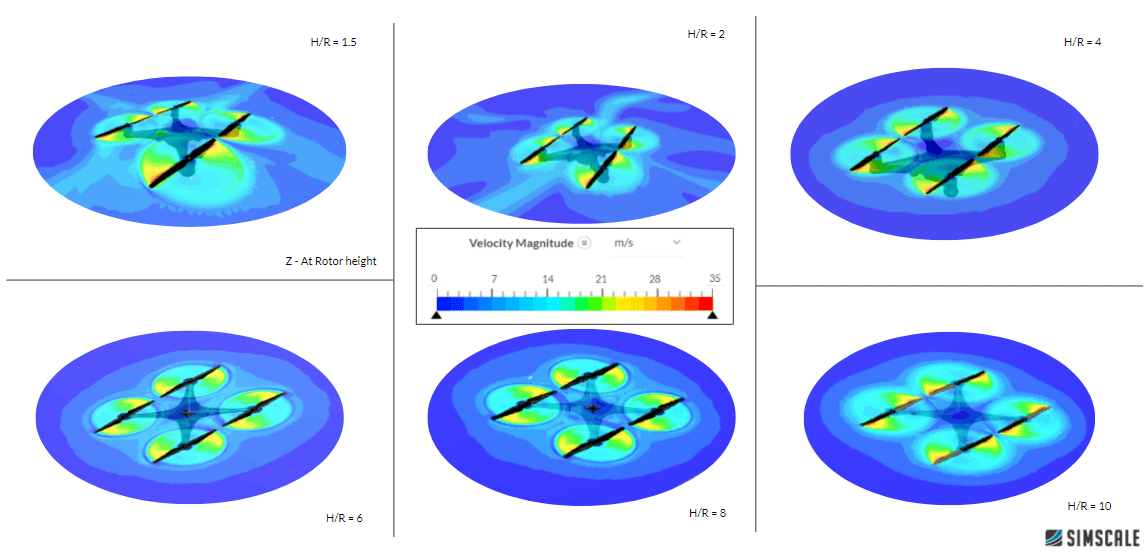
The velocity at different heights can be seen in the figure below. As expected with the increasing distance of the quadcopter from the ground, the velocity at the ground is slower and more diffuse which decreases the thrust of the quadcopter.

Note
If you still encounter problems validating you simulation, then please post the issue on our forum or contact us.
Last updated: February 28th, 2023
We appreciate and value your feedback.
Sign up for SimScale
and start simulating now